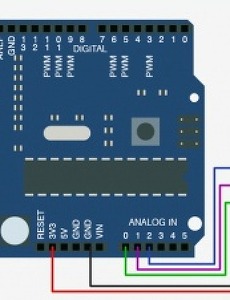
분류 전체보기82 youtube @user 핸들 변경하기 유투브 계정아이콘을 누르면 나오는 @user~~~~ 는 유투브에서 크리에이터를 식별하는 수단으로 계정과 채널 이름과 구분되는 식별자인 핸들이다. youtube URL이 되어 쉽게 채널을 찾기도하며 (예 youtube.com/@user~~~) youtube에서 댓글, 멘션, shorts등에서 핸들이 표시 되어 채널을 홍보할 수 있다. 채널을 만들때 별도로 지정하지 않으면 아래 처럼 난해 하게 만들어지므로 핸들을 자신에 맞게 변경해보자. ▶ 유투브 → 우측 상단 계정아이콘 → 내 채널 ▶ 채널 맞춤설정 ▶ 기본정보 → 핸들 문자 및 숫자를 추가하여 만들 수 있고, 변경한 핸들은 14일 이내에 다시 되돌릴 수 있다. 더 자세한 사항은 youtube 고객센터 핸들 2023. 10. 2. 포텐셜미터+네오픽셀(포텐셜미터를 회전시켜 네오픽셀을 이동하듯...) #include #ifdef __AVR__ #include #endif #define PIN 6 // 네오픽셀 연결핀 #define NUMPIXELS 24 // 네오픽셀 수 Adafruit_NeoPixel pixels = Adafruit_NeoPixel(NUMPIXELS, PIN, NEO_GRB + NEO_KHZ800); // 네오픽셀을 pixels로 정의 int delayval = 500; // delay for half a second int a; void setup() { #if defined (__AVR_ATtiny85__) if (F_CPU == 16000000) clock_prescale_set(clock_div_1); #endif pixels.setBrightness(20); // 0~255.. 2023. 10. 2. EV3 색상 분류기 레고의 NXT 다음 버전인 EV3로 색상 분류기를 구현 하였다. 색상분류기의 작동은 색블럭을 칼라센서에 인식시키고 인식된 색은 메모리에 차례로 저장되며 저장된 색에 따라 색 블럭을 해당 위치에 분류해낸다. 제작도와 프로그램이 기본으로 들어있어 제작은 물론 프로그램을 해석하여 그 작동 방법을 알아낼수 있다. 아래 영상은 프로그램을 프로그램을 해석한후 직접 다시 작성 해보았다. (물론 거의 보고 따라한 수준에 불과 하지만...) 2014. 8. 4. LCD쉴드 + 가속도센서 각도 측정 가속도 센서로 각도를 측정하여 자작한 LCD쉴드에 출력 serial모니터로 출력하여 측정된값을 컴퓨터로 출력하여 확인하지 않고 아두이노에 LCD를 부착하여 측정값을 바로 확인할수 있도록 하였다. LCD쉴드 http://eskelt.tistory.com/78 글 참고 가속도센서 http://eskelt.tistory.com/79 글 참고 가속도센서로 각도측정 http://eskelt.tistory.com/80 글 참고 소스 스케치 ============================================================================ #include LiquidCrystal lcd(12, 11, 5, 4, 3, 2); float x,y,z; void setup(){ lcd... 2013. 6. 28. 가속도 센서로 각도 측정 가속도 센서로 각도 측정 가속도센서에 대한 기본은 이전글 확인 http://eskelt.tistory.com/79 이전글에서 확인할수 있듯이 사용한 ADXL335 센서는 한축을 -90~90도로 기울이면 -1g~1g값을 아날로그 값으로 출력해준다 이값을 아두이노에서 아날로그 입력을 받아 각도로 변환 출력하면 된다. 즉, 입력받은 값을 -1 ~ 1 값으로 매핑 이 값은 sin(-90도)~sin(90도) 값이므로 asin(-1)~asin(1)로 라디안 값을 구하고 각도로 변환하면 된다. 센서회전(가속도) 센서에서 출력되는 값 sin(-90도)~sin(90도) 값으로 매핑 asin으로 라디안 얻고 라디안값을 각도로 변환 -90도 (-1g) 270 -1 asin(-1) = -π/2 asin(-1)*180/π = .. 2013. 6. 28. 가속도센서 가속도 센서 사용한 가속도센서는 ADXL335로 3축(x,y,z축) ±3g 측정가능하다. datasheet를 참고 하면 전원은 3V를 사용 (유의 해야한다. 아두이노의 3.3V를 사용하면된다.) 각 축이 0g상태에서는 1.5V를 출력하고 ±1g 마다 ±300mV로 가감하여 출력한다. 실제로 자연 상태는 1g로 센서의 각 축을 -90도와 90도로 기울리면 각각 -1g와 1g가 측정할수 있다. 즉 (x축만 정리하면) x축이 중력방향으로 기울면 (90도, 지표의 수직아래) 1g상태 x축 단자에서 1.8V출력 x축이 중력방항과 수직이면 (0도, 지표와 수평) 0g상태 x축 단자에서 1.5V출력 x축이 중력방향과 반대방향으로 기울면 (-90도, 지표의 수직위) -1g상태 x축 단자에서 1.2V출력 된다. => 1.. 2013. 6. 26. 이전 1 2 3 4 5 6 7 ··· 14 다음