서보모터 제어
서보모터는 일정한 각도내에서만 회전을 하는 모터로
RC비행기의 타각조절이나 휴머노이드 로봇등에서 많이 사용한다.
서보의 작동은 일정 시간 동안 신호를 보내면 그신호 펄스 폭이
서보의 작동 각도가 된다.
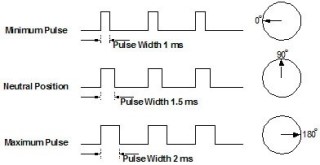
그림에 의하면 1.5ms동안 펄스를 보내면 서보는 90도 위치로 회전
다시 1ms동안 펄스를 보내면 서보는 0도에 위치한다.
즉 서보는 매20ms마다 신호를 받으려 기다리고
그때마다 보내는 신호의 길이에 따라 해당 각도로 회전한다.
소스 스케치
이 소스는 서보를 제어하기 위해 신호를 직접 계산함
---------------------------------------------------------------------------
// 키보드의 < , > ,스페이스키 서보를 제어.
// 날짜 : Created 10 December 2007
// 저자 : Brian D. Wendt http://principialabs.com/
// 참조 : Tom Igoe의 코드를 적용함 : http://itp.nyu.edu/physcomp/Labs/Servo
// 날짜 : Created 10 December 2007
// 저자 : Brian D. Wendt http://principialabs.com/
// 참조 : Tom Igoe의 코드를 적용함 : http://itp.nyu.edu/physcomp/Labs/Servo
int servoPin = 2; // 서보에 신호를 주기위한 핀
int minPulse = 600; // 서보에 최소신호폭 0.6ms로 계산됨
int maxPulse = 2400; // 최대 신호폭 2.4ms로 계산됨
int turnRate = 100; // 키보드 조작으로 서보를 조절할때 움직이는 폭 0.1ms
int refreshTime = 20; // 서보가 새신호를 받아오는 시간 간격
int centerServo; // 서보의 중앙위치 값을 저장하기 위한 변수
int refreshTime = 20; // 서보가 새신호를 받아오는 시간 간격
int centerServo; // 서보의 중앙위치 값을 저장하기 위한 변수
int pulseWidth; // 서보의 신호폭
int moveServo; // raw user input
long lastPulse = 0; // recorded time (ms) of the last pulse
void setup()
{
pinMode(servoPin, OUTPUT); // Set servo pin as an output pin
centerServo = maxPulse - ((maxPulse - minPulse)/2);
int moveServo; // raw user input
long lastPulse = 0; // recorded time (ms) of the last pulse
void setup()
{
pinMode(servoPin, OUTPUT); // Set servo pin as an output pin
centerServo = maxPulse - ((maxPulse - minPulse)/2);
Serial.begin(9600); // 키보드로 제어하기 위해 통신 시작
pulseWidth = centerServo; // 처음 켤때 서보의 위치를 중앙으로 주기위함.
}
void loop()
pulseWidth = centerServo; // 처음 켤때 서보의 위치를 중앙으로 주기위함.
}
void loop()
{
// 입력을 기다린다
if (Serial.available() > 0)
{
// 입력된 값을 읽는다
moveServo = Serial.read();
// 키보드 문자값에서, ASCII '<' 는 44, ASCII '>'는 46 , 스페이스는 32
if (moveServo == 44) { pulseWidth = pulseWidth - turnRate; }
if (moveServo == 46) { pulseWidth = pulseWidth + turnRate; }
if (moveServo == 32) { pulseWidth = centerServo; }
// min 과 max에서 서보를 정지한다.
if (pulseWidth > maxPulse) { pulseWidth = maxPulse; }
if (pulseWidth < minPulse) { pulseWidth = minPulse; }
}
// 서보의 펄스는 pulseWidth으로 매 20 ms 마다 갱신된다.
// 만일 각도가 그대로 이면, 서보의 위치를 고정한다.
if (millis() - lastPulse >= refreshTime)
{
digitalWrite(servoPin, HIGH); // 신호를 보내기 시작
// 입력을 기다린다
if (Serial.available() > 0)
{
// 입력된 값을 읽는다
moveServo = Serial.read();
// 키보드 문자값에서, ASCII '<' 는 44, ASCII '>'는 46 , 스페이스는 32
if (moveServo == 44) { pulseWidth = pulseWidth - turnRate; }
if (moveServo == 46) { pulseWidth = pulseWidth + turnRate; }
if (moveServo == 32) { pulseWidth = centerServo; }
// min 과 max에서 서보를 정지한다.
if (pulseWidth > maxPulse) { pulseWidth = maxPulse; }
if (pulseWidth < minPulse) { pulseWidth = minPulse; }
}
// 서보의 펄스는 pulseWidth으로 매 20 ms 마다 갱신된다.
// 만일 각도가 그대로 이면, 서보의 위치를 고정한다.
if (millis() - lastPulse >= refreshTime)
{
digitalWrite(servoPin, HIGH); // 신호를 보내기 시작
delayMicroseconds(pulseWidth); // 신호의 간격
digitalWrite(servoPin, LOW); // 신호를 멈춤
lastPulse = millis(); // save the time of the last pulse
}
}
lastPulse = millis(); // save the time of the last pulse
}
}
위 소스는 어렵고 길다.
작동 원리를 알아보기 위해 작성된것이고
아두이노가 제공하는 서보 함수를 이용하면 매우 간단하다.
/*센서로 서보 제어*/
#include <Servo.h> //서보를 사용하기 위한 해더 파일
int sensorPin = A0; //센서핀 설정
int val = 0; // 센서값을 저장하기 위한 변수
Servo servoA; //서보사용을 위한 servoA 선언
int val = 0; // 센서값을 저장하기 위한 변수
Servo servoA; //서보사용을 위한 servoA 선언
void setup(){
servoA.attach(9); // 서보연결핀은 9
}
servoA.attach(9); // 서보연결핀은 9
}
void loop(){
val = analogRead(sensorPin); // 센서에서 값을 읽어 val에 저장
val = map(val,0,1023,0,179); // map함수 측정된 0~1023사이의 val 값을 0~179 값으로 변환
servoA.write(val); // 서보에 변환된 val값을 씀. 그 값(각도위치)에 따라 서보 작동
}
val = analogRead(sensorPin); // 센서에서 값을 읽어 val에 저장
val = map(val,0,1023,0,179); // map함수 측정된 0~1023사이의 val 값을 0~179 값으로 변환
servoA.write(val); // 서보에 변환된 val값을 씀. 그 값(각도위치)에 따라 서보 작동
}
------------------------------------------------------------------------------------
작동영상
'아두이노_프로세싱 > 아두이노' 카테고리의 다른 글
| FND (0) | 2012.06.26 |
|---|---|
| 74hc595 shift register를 이용한 아두이노 포트 확장 (0) | 2012.06.26 |
| 피에조 스피커를 이용, 소리에 반응하는 LED (0) | 2012.06.26 |
| 센서값에 따른 Led 밝기 제어 map()함수 사용 (0) | 2012.06.26 |
| 외부 빛의 양에 따른 LED깜박이기 + 부저 (0) | 2012.06.26 |